Daniel Hernández García
Postdoctoral Research Associate in HRI at Heriot-Watt University.
About me
I am Dr. Daniel Hernández García, I am a researcher in Robotics, Cognitive Sciences, Human-Robot Interaction and Socially-Aware Assistive Agents from Spain. I hold a Ph.D. in Electrical Engineering, Electronics and Automation from the Universidad Carlos III de Madrid (Spain). My thesis work focused on learning, representation and generation of robot skill knowledge for humanoid robots reproduction.
Currently, I live in Edinburgh, Scotland (United Kingdom) where I’m a Research associate at the Interaction Lab, School of Mathematical and Computer Sciences, Heriot-Watt University.
(If you’re interested go to my research page to learn more).



In 1983 I was born in Caracas, Venezuela, a rosy cheek beautiful baby boy. My father is from Venezuela, and my mother is from Asturias in Spain. I have two brothers, one older and one younger. I attended Colegio Santo Tomás de Aquino, through all of my formative years, where I got very good grades, I was semifinalist and finalist at Mathematics and Physics Olympics at some year, I play football and baseball, and once I fractured my left humerus (not really sports related). In 2001 I started my studies at Universidad Simón Bolívar in Caracas, Venezuela, from where I graduated in 2007 as an Electronic Engineer, and was a member of the Electronics Students Center. Between September 2005 until March 2006 I was an Undergraduate Teacher Assistant, my first pay job, for Computer Architectures I (Arquitectura del Computador I) and Computer Architectures II (Arquitectura del Computador II) in the Electronics and Circuits Department. In 2006, as part of my engineering course and end-of-degree project, I was a visiting researcher at the Instituto de Automatica Industrial (now called Centro de Automática y Robótica) under the supervision of Dr. Manuel Armada; in collaboration with Dr. Gerardo Fernandez (as supervisor from my university) and the Grupo de Investigación y Desarrollo en Mecatrónica. Here I took my first steps into robotics research. My work consisted on designing and implementing a Human-Robot Interface for controlling the REST Robot, a climbing hexapod robot intended for welding tasks in ferromagnetic walls.
After graduation I worked in 2007-2008 for EINPHOS and the Sartenejas Technology Park, as a R&D engineer for two projects; the Automatization of the Theatrical Rigging System of the Ríos Reyna Hall at The Teresa Carreño Cultural Complex; and researching viability of implementing traffic engineering and intelligent transport systems (ITS) in the area surrounding the university campus. By 2008 the process of erosion and destruction of Venezuela carried out by Chavez regime, later continued by Maduro, have already reach a point where a future in my native country was no longer a viable option and I embarked on a quest to build an academic career by pursuing a Master and Ph.D degrees in Europe.
I was awarded a FPI (“Formación Profesional Investigador”) grant from the Spanish Government, for the formation of researchers and doctoral candidates. My 4 year grant was assigned to project DPI2007-60311 COOPERACION ACTIVA DE ROBOTS HUMANOIDES Y HUMANOS EN ENTORNOS COLABORATIVOS DE TRABAJO (Active Cooperation of humanoid robots and humans in collaborative working environments) under the supervision of Dr. Carlos Balaguer. From October 2008 I became a part of the RoboticsLab at the Universidad Carlos III de Madrid (UC3M). My research at the RoboticsLab was focused in forms of cooperation between humanoid robots and humans; by teleoperation, autonomous learning, programming by demonstration. I study human-robot interaction and robot-robot interaction for transferring of skills knowledge. I was part of the FP6 european project ROBOT@CWE (Advanced robotic systems in future collaborative working environments).
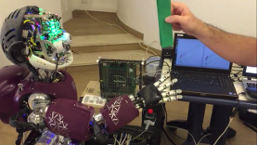
Between March and July 2010 I did a secondment with one of the partners from the project, the École Polytechnique Fédérale de Lausanne under the supervision of Dr. Aude Billard. I was visiting researcher at the Learning Algorithms and Systems Laboratory (LASA), I worked on learning within the framework of programming by demonstration. My research was focused on developing interfaces for natural human-machine type of interactions. I Implemented 3 controllers learning the position and orientation of the end-effector in a manipulation task; a uncoupled controller of position and orientation, a fully coupled controller of position and orientation and finally a partially coupled controller of the orientation in relation to the position.
In October 2010, I was awarded the qualification of Master in Robotics and Automation by the Universidad Carlos III de Madrid. During my master I worked in remote cooperation between humanoid robots and humans; human-robot interaction and robot-robot interaction; and remote transfer of skills. My master thesis was entitled “Human-Robot Remote Collaboration and Learning of Skills”. A robot-human-robot collaboration architecture was developed for a human operator and a local robot to collaborate with a robot located at a remote location.
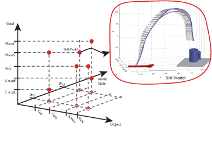
I continued working in the RoboticsLab at UC3M for the completion of my Ph.D. My work focused on learning, representation generation and adaptation of robot skill knowledge for humanoid robots reproduction. My work focused on a cognitive framework for learning and adapting models of robot skills knowledge. The proposed framework allow for an operator to teach and demonstrate the robot the motion of a task skill it must reproduce; to build a knowledge base of the learned skills knowledge allowing for its storage, classification and retrieval; and to adapt and generate new models of a skill for compliance with the current task constraints. The framework was implemented in the humanoid robot HOAP-3 and experimental results show the applicability of the approach. I completed my Ph.D. in Electrical Engineering, Electronics and Automation in October 2014 under the supervision of Dr. Carlos Balaguer and Dr. Concepción Monje for the Department of Systems and Automation Engineering at UC3M. My Ph.D. thesis was entitled “Robot skills adaptation of learned models with task constraints”.



In April 2016 I moved to the lovely Plymouth in Devon, United Kingdom to start a position as a postdoctoral research fellow in Cognitive and Neuro-robotics in the group of Angelo Cangelosi. Here I worked under the scope of UK EPRSC project BABEL: Bio-Inspired Architecture for Brain Embodied Language. BABEL aims at advancing the understanding of neural and behavioural mechanisms in word learning, the validation of these principles in neuroanatomically grounded models, and real-time implementations of brain language models within the SpiNNaker neuromorphic architecture that will support comparisons with neuroimaging experiments. My work focused on developmental cognitive robotics and neurobotics, and the use of neuromorphic hardware to implement a real-time neural control architecture. For BABEL I integrated a neuroanatomically grounded spiking neural network for visual attention with the iCub humanoid robot and SpiNNaker neuromorphic hardware. Latter the network was extended with a word learning capability to demonstrate attention-led object naming with the iCub robot. At the end of the project in March of 2017 I visited the IIT in the iCub rearch line. For 3 weeks I was an Affiliated Researcher at IIT under the supervision of Chiara Bartolozzi. I worked in the integration of spiking network models and an embodied cognitive robot into a neuromorphic system, using asynchronous event-based vision sensors and the SpiNNaker spiking neural processor.
In April 2017 I started a new position as research fellow in Human-Robot Interaction, still within the Centre for Robotics and Neural Systems at Plymouth University, but now under the supervision of Tony Belpaeme working with his group (this meant a changed of projects, group, office and floor, but I still come down to visit my former mates every time I miss them ![]() ). My research was carried out under the scope of two EU projects DREAM and L2TOR, focused on Human-Robot Interaction and Deep Learning in social robots for education and therapy.
). My research was carried out under the scope of two EU projects DREAM and L2TOR, focused on Human-Robot Interaction and Deep Learning in social robots for education and therapy.



From 2019 I was a Postdoctoral Research Associate at the COGNITIVE ROBOTICS LAB in the Department of Computer Science, University of Manchester (United Kingdom). Here I worked in the MoveCare project to provide, through artificial intelligence, assistance, activities and transparent monitoring to the elder at home.
Since April 2020 I work as a Postdoctoral Research Associate at the Interaction Lab, School of Mathematical and Computer Sciences, Heriot-Watt University in research on Human-Robot Interaction in social robots for elderly care in the scope of the H2020 SPRING project. I’m focused on developing socially aware robots with the capacity for cognitive interactions, with a particular emphasis into bringing socially assistive robots into gerontological healthcare.




I speak Spanish and English. I did A1 level course for German (but can’t remember much). I have learned and pick up in time a bit of French (but can’t speak or understand much really) and Italian (know only the bad words ![]() ). And I’ve been taught to say “arigato gozaimashita” in Japanese.
). And I’ve been taught to say “arigato gozaimashita” in Japanese.
I liked sports (playing and watching), at school I was part of the football and baseball teams, I have also played, for hobby, basketball, softball, volleyball, tennis and padel. As a kid I was a yellow belt in karate (or maybe taekwondo, can’t remember), I have also practice swimming, running, yoga and climbing. I would like to try rowing, surfing and tai chi. I love chess (but I don’t count it as a sport).
I like reading, all kind of books, novels, comics and short stories. I like watching movies and TV series, theater plays and musicals, and playing video games. But this are just mediums, what I really love in life are stories! All kind of stories and tales, real or fantasy, fiction or non-fiction, crime, drama, adventure, science fiction, politics, history, comedy, etc. I like to know what happens. I also like to paint and draw, I’m kind of not bad at it.




![]()
![]()